** DRAFT Aug. 8th, 2015 **
*** Project: Arduino & BMW K/I-Bus Interface ***
** Intro located here ***
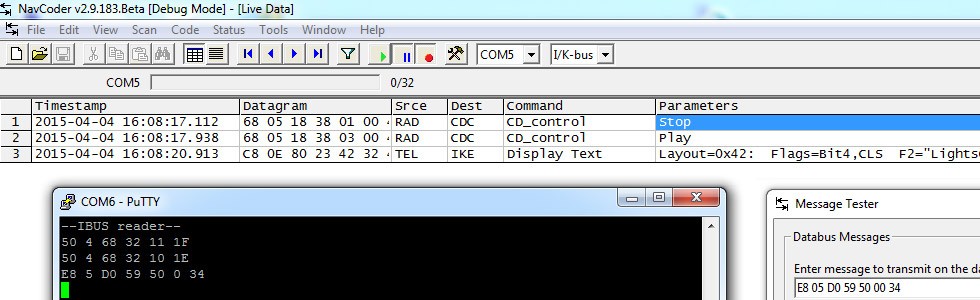
Now that we’ve got our interface integrated to the car, we can either use NavCoder for message analysis, or our USB to TTL converter for debugging our Arduino interface coding.
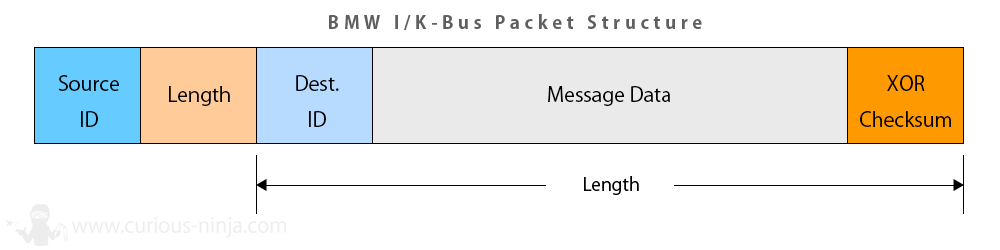
As was discussed on the Technical Details page, the I/K-Bus packet structure looks like this:
1. Transmitter address (8 bit Source ID)
2. Length of data (number of following message bytes)
3. Receiver address (8 bit Destination ID)
4. Detailed description of message (maximum 32 bytes of data)
5. Summary of transmitted information (check sum)
The XOR checksum byte is used to check the integrity of the message. The receiver will compare that value with its own computation, and if not equal, will reject the packet.
Below is an excel spreadsheet of various I/K-Bus messages and their descriptions.
I will eventually clean up and organize the spreadsheet into separate sections on this page for better readability.
Multi-Function Steering Wheel (0x50):
Coming soon.
General Module V (0x3F):
Windows and Doors:
Lights:
Locks:
Coming soon.
Radio (0x68):
Coming soon.
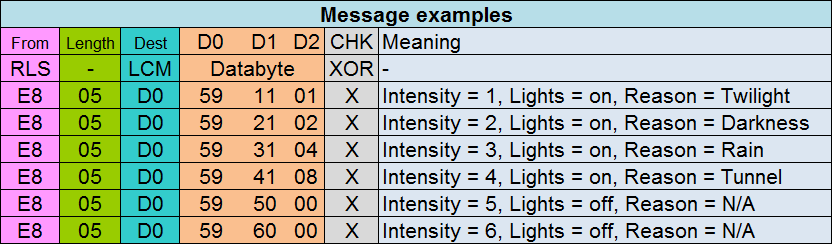
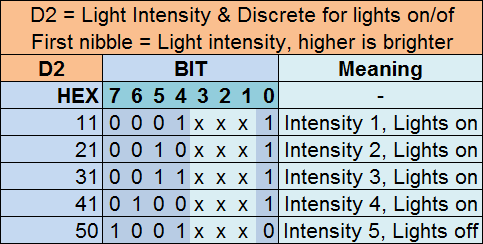
Rain/Light Sensor (0xE8):
The RLS (Rain/Light Sensor, 0xE8) sends a message to the LCM (Light Control Module, D0) once every 10 seconds. The message contains:
• Ambient Light Intensity
• Lights on/off command
• Reason for lights on command
Examples of RLS messages:
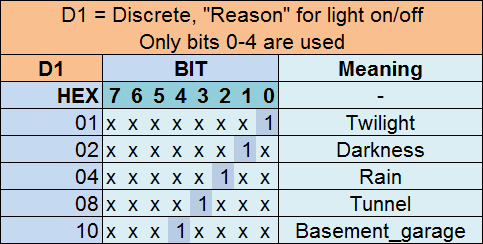
Databytes explained:
CD Player (0x18):
Coming soon.
Instrument Cluster (0x80):
Coming soon.
Project Continued:
• Intro
• Technical Details
• Schematic Description
• Resources & Downloads
• Programming
• Integration
• Messages